1. filter function of the measuring amplifier
The output signal of a force sensor or strain gauge is made up of static components (DC voltage components) and dynamic components (vibrations or rapid, pulse-like signal changes).
The static component can be, for example, the weight on a load cell; dynamic components result, for example, from shock-like loads when a weight is applied.
Other causes of dynamic loads are, for example, vibrations of the system with the natural frequency of the load cell and mass (“mechanical spring” and “weight”).
Unwanted dynamic components are, for example, interferences of e.g. 50Hz or 100Hz from other electrical devices or from cables laid parallel to the sensor cable. The amplifier electronics themselves also generate dynamic components (noise with a large number of frequency components (“white noise”).
The task of the low-pass filter is to remove the dynamic components in the output signal in order to allow only the desired frequency components to pass. By limiting the so-called “bandwidth”, the resolution is improved, e.g. by filtering oscillations and transmitting only the “static” part of a scale.
The more dynamic components a signal contains, the greater the noise amplitude. As a rule of thumb: 10 times the bandwidth means 3 times the noise amplitude (√10 times for white noise, to be precise).
Therefore, the bandwidth of the measuring amplifier should be selected “as low as possible” and “as high as necessary”.
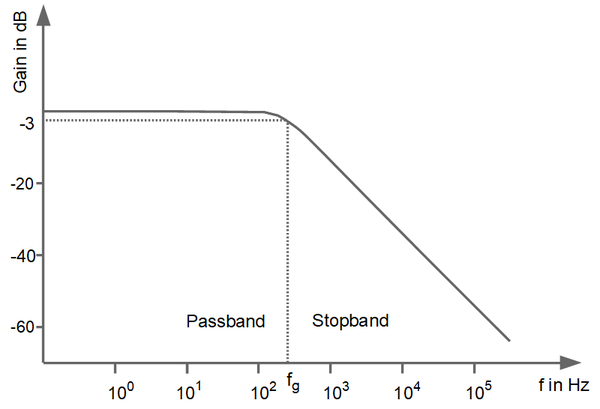
2 Cut-off frequency of the low-pass filter
At the cut-off frequency fg, the signal amplitudes are attenuated by 3dB (to approx. 70% amplitude compared to static signals).